摘要
擴增實境中最大的難題,就是深度感知遮擋,虛擬物件與現實場景物體相互交錯並 不是一件簡單的事,虛擬物件不像人類有對物理世界的理解,只是單純的被疊加於場景 之上,無法被遮擋,使得場景變的不真實。現有的擴增實境技術,雖已能做到使虛擬物 體被現實世界物體遮蔽,但在移動的畫面中,還是無法快速且精準得知所有物體的每個 深度值情況下,仍有閃爍或不準確的情況發生。本論文所提的系統使用稀疏的 SLAM 重 構點雲資訊作為輸入,取代原有技術中計算光流的方法,採用深度學習中訓練好的光流 估計模型。用在估算定位準確的遮蔽邊緣,將稀疏深度點雲傳播至估算好的遮蔽邊緣圖 中,產生深度圖。將深度圖進一步用在擴增實境中,無法達到即時生成,但能有效解決 遮擋問題。本論文所提的系統使用深度學習計算光流的方法,雖然在時間上比原有技術 費時,但精度上比原有技術更加精確。
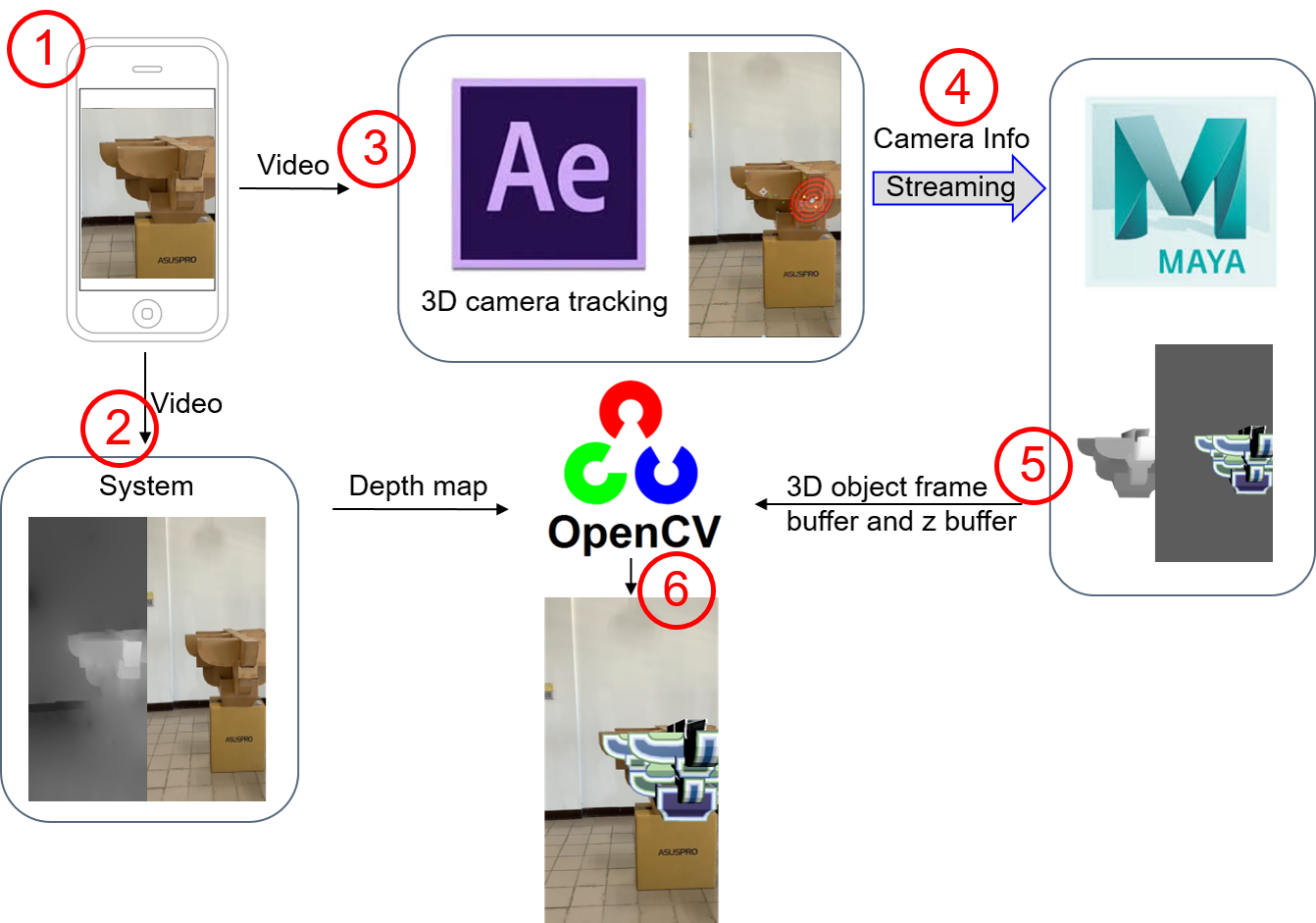
AR Effect
- 使用手機or平板拍攝影片
- 將影片輸入深度圖系統
- 將影片放入After Effect,計算鏡頭移動軌跡
- 將相機移動軌跡輸入MAYA場景中
- 在MAYA中製作虛擬物件,並輸出虛擬物件RGB及深度圖
- 使用OpenCV結合真實場景與虛擬物件,製作擴增實境遮蔽感知效果